|
I am a researcher at NVIDIA GEAR Lab, working at the intersection of robotics and machine learning. I received my Ph.D. from UT Austin and previously worked at Boston Dynamics. Email / CV / Google Scholar / LinkedIn / GitHub |

|
|
|
|
Atlas LBM Team, Blog post, 2025 Link Large behavior model that lets Atlas use vision, proprioception, and language cues to perform long-horizon tasks combining locomotion + whole-body manipulation |
|
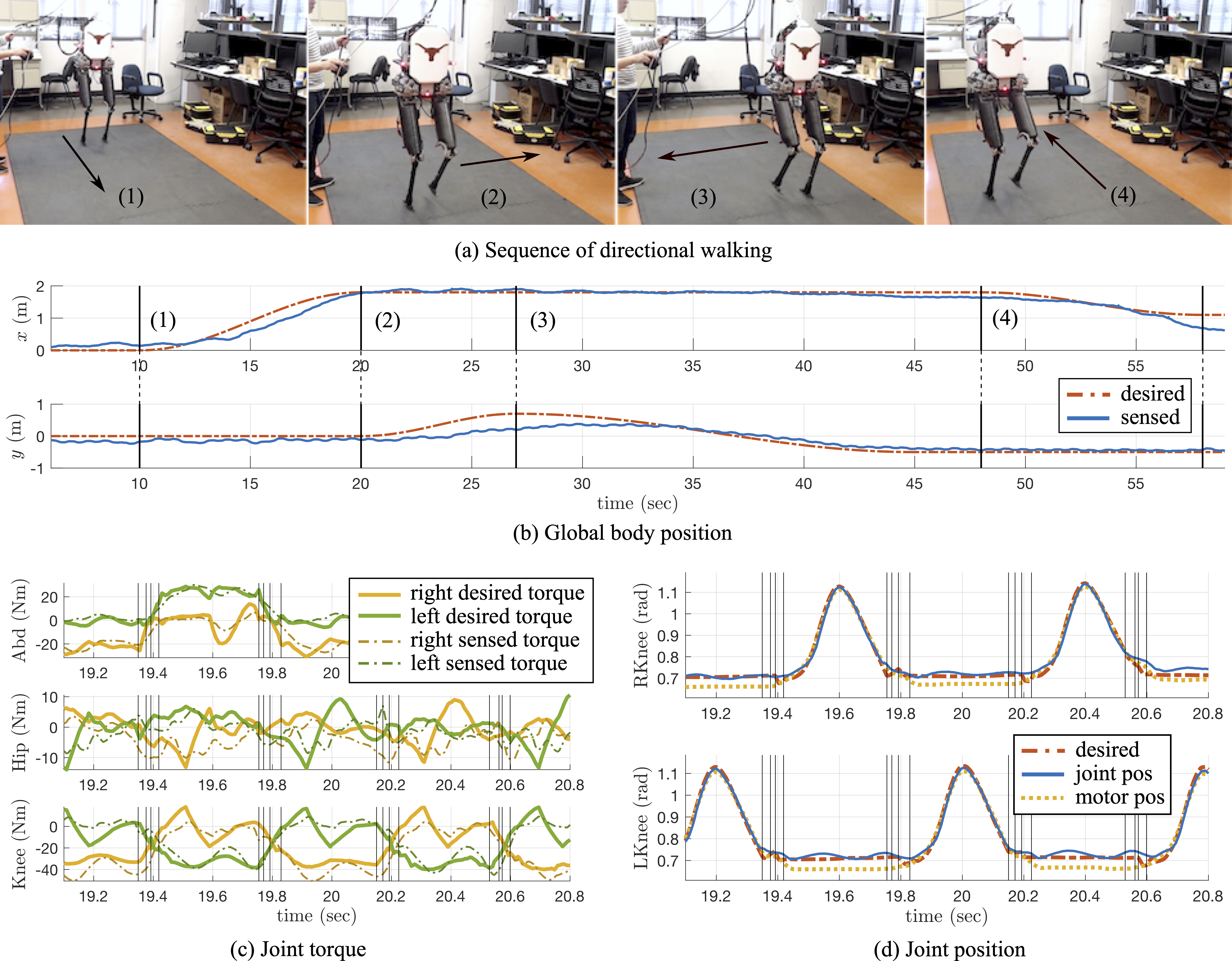
Seung Hyeon Bang, Carlos Gonzalez, Junhyeok Ahn, Nick Paine, Luis Sentis Frontiers in Robotics and AI, 2023 PDF / BibTeX Control and evaluation of Draco3 humanoid robot. |
|
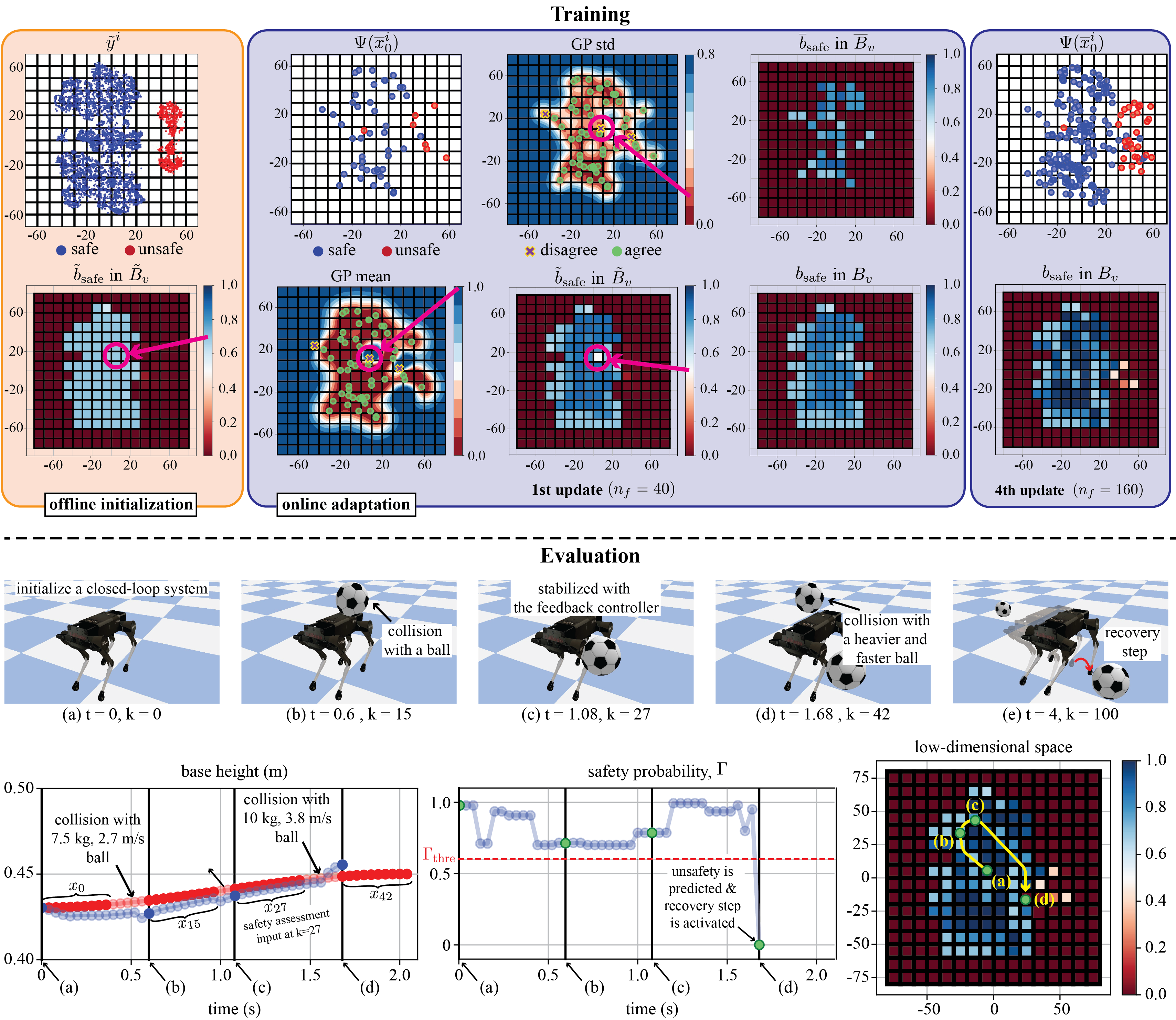
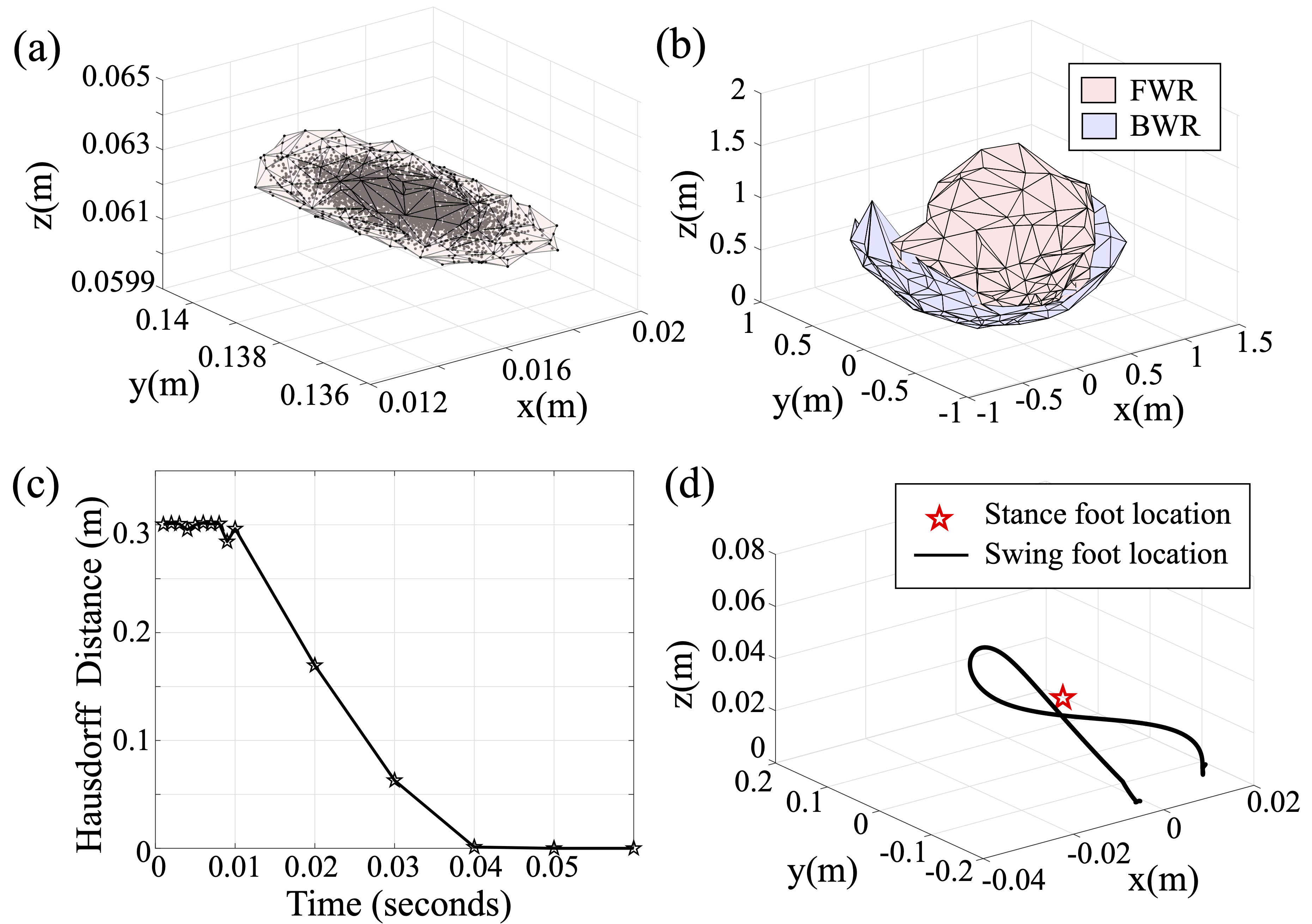
Junhyeok Ahn, Seung Hyeon Bang, Carlos Gonzalez, Yuanchen Yuan, Luis Sentis IEEE-RAS International Conference on Humanoid Robots, 2022 PDF / BibTeX Learning-based safety verification tool for legged robots. |
|
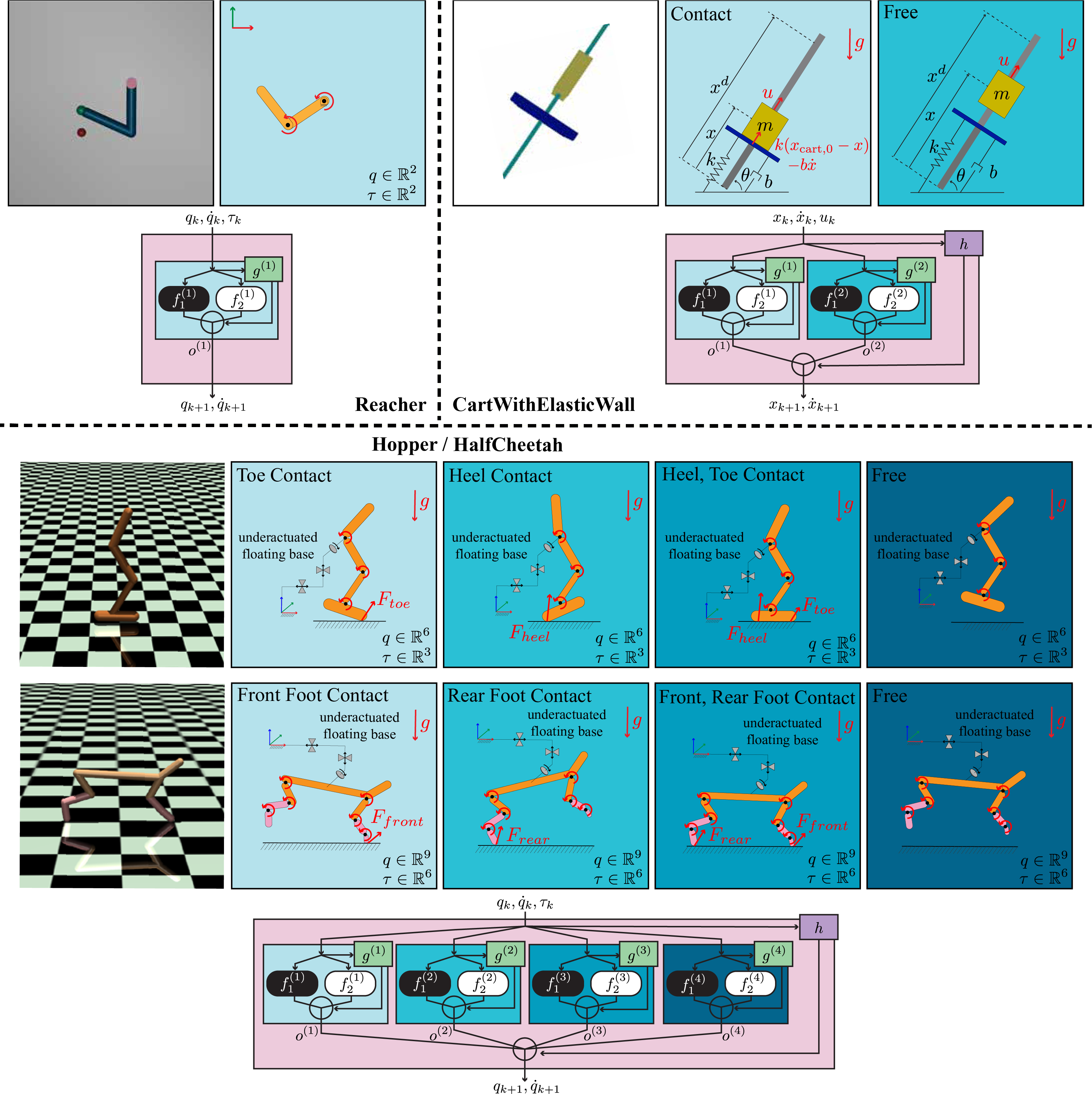
Junhyeok Ahn, Luis Sentis Learning for Dynamics and Control, 2021 PDF / BibTeX Novel network representation for hybrid dynamical systems. |
|
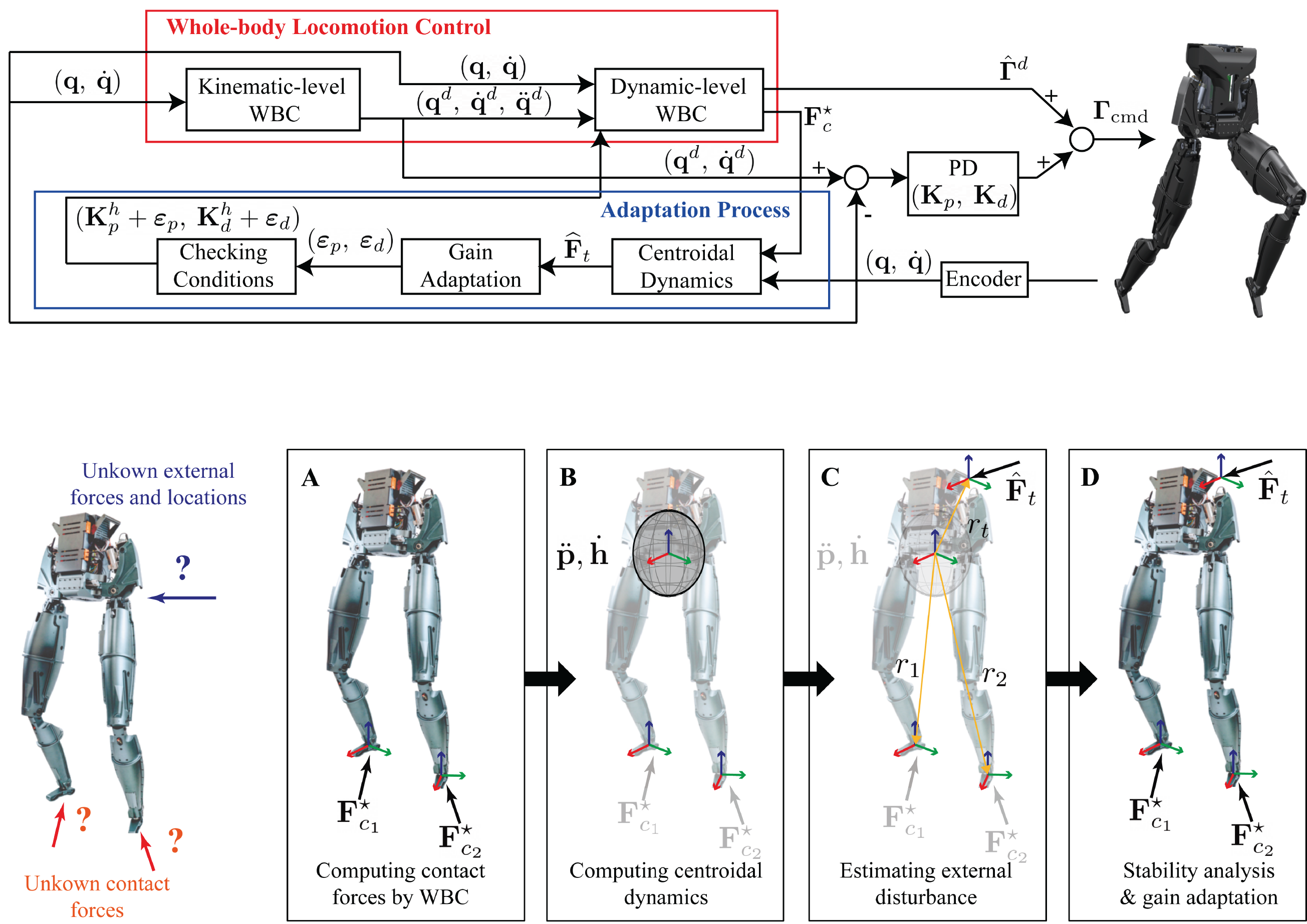
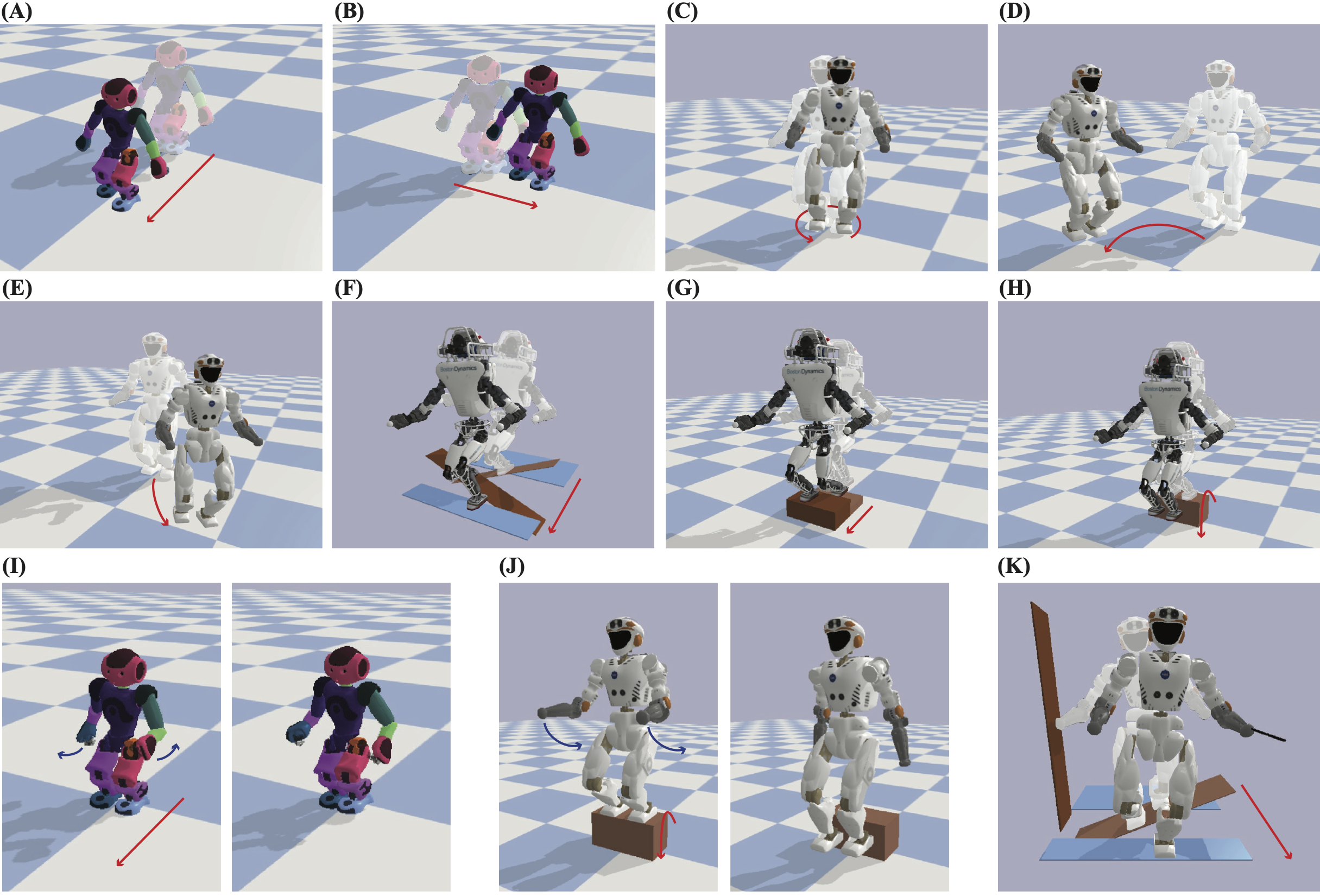
Jaemin Lee, Junhyeok Ahn, Donghyun Kim, Luis Sentis Frontiers in Robotics and AI, 2021 PDF / BibTeX Robust gain adaptation method in whole-body controller. |
|
Junhyeok Ahn, Steven Jens Jorgensen, Seung Hyeon Bang, Luis Sentis Frontiers in Robotics and AI, 2021 PDF / BibTeX Trajectory optimization framework with a centroidal inertia network and whole-body controller with an implicit task hierarchy for humanoid robots. |
|
Jaemin Lee, Junhyeok Ahn, Efstathios Bakolas, Luis Sentis American Control Conference, 2020 PDF / BibTeX Trajectory generation based on sampling-based reachability analysis and optimal control. |
|
Donghyun Kim, Steven Jens Jorgensen, Jaemin Lee, Junhyeok Ahn, Jianwen Luo, Luis Sentis The International Journal of Robotics Research, 2020 PDF / BibTeX Time-to-velocity reversal planner and whole-body locomotion controller for passive-ankle bipeds. |

|
Junhyeok Ahn, Jaemin Lee, Luis Sentis IEEE Robotics and Automation Letters, 2020 PDF / BibTeX Safe and efficient learning of locomotion policy combining a capturability, control barrier function, and hierarchical reinforcement learning. |
|
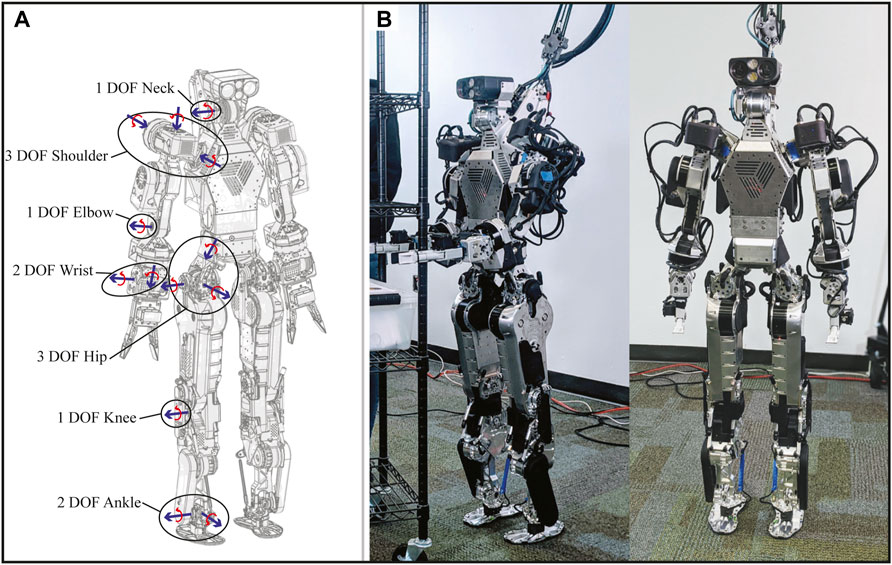
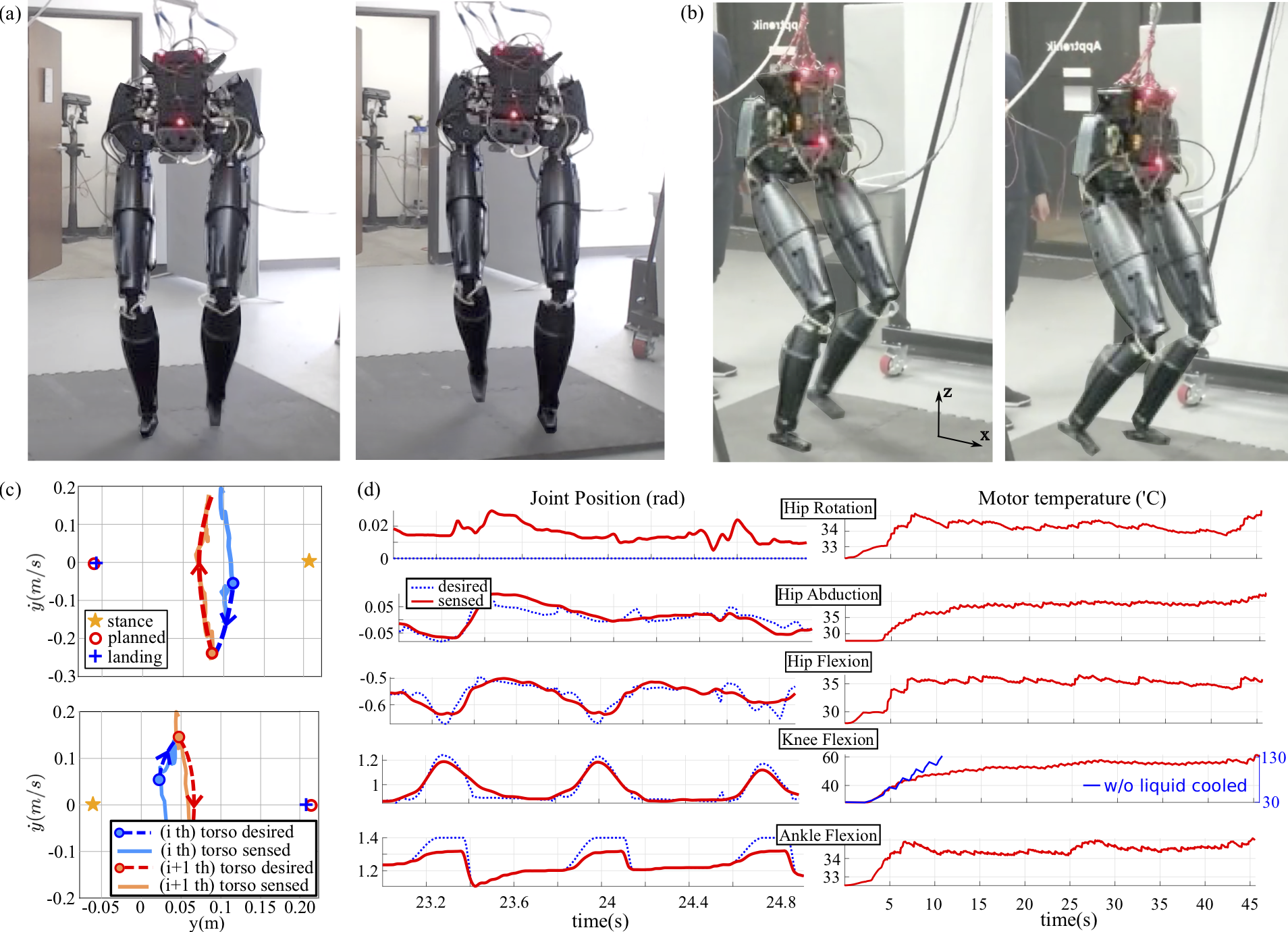
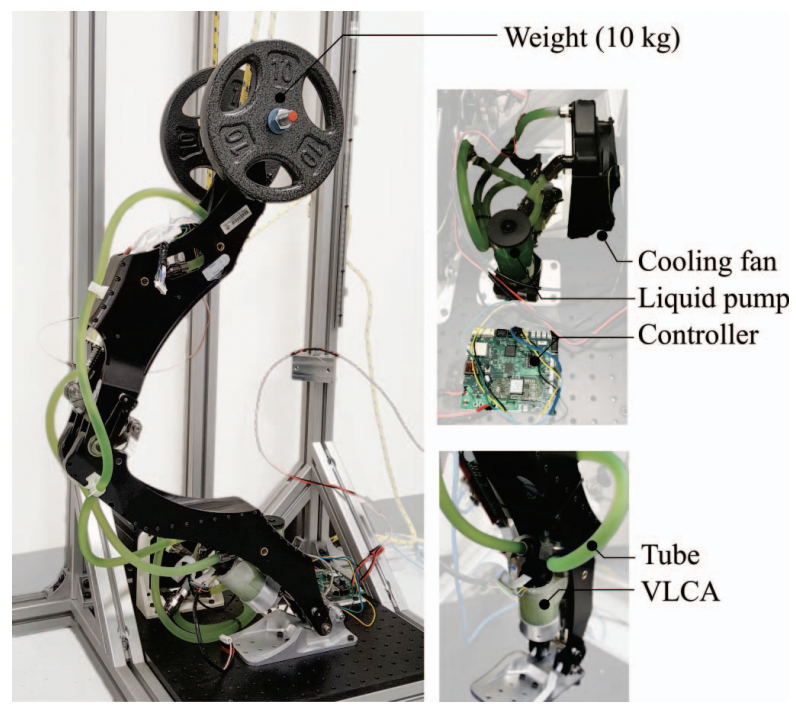
Junhyeok Ahn, Donghyun Kim, Seung Hyeon Bang, Nick Paine, Luis Sentis IEEE-RAS International Conference on Humanoid Robots, 2019 PDF / BibTeX Design, control, and evaluation of a new human-scaled biped robot with liquid cooled viscoelastic actuators. |
|
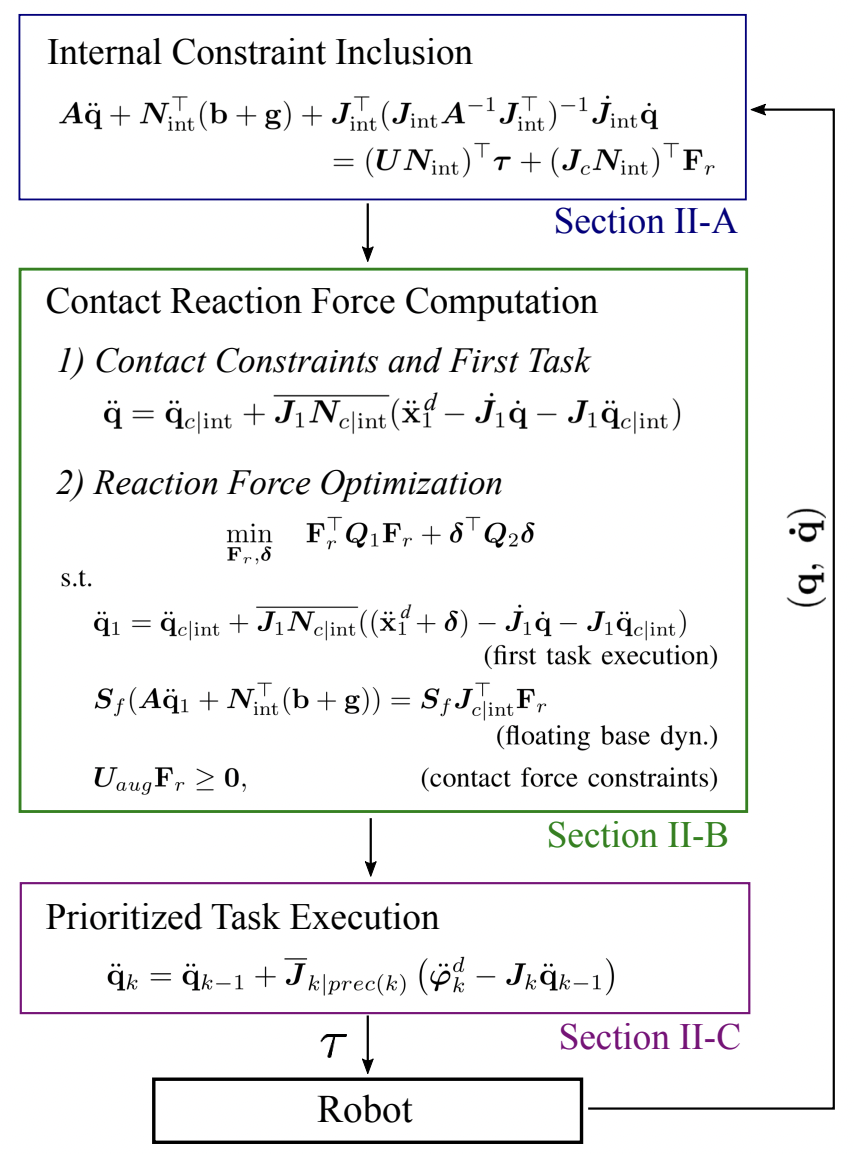
Donghyun Kim, Jaemin Lee, Junhyeok Ahn, Orion Campbell, Hochul Hwang, Luis Sentis IEEE/RSJ International Conference on Intelligent Robots and System, 2018 PDF / BibTeX Whole-body controller that considers centroidal momentum dynamics, operational task priorities, contact reaction forces, and internal force constraints. |
|
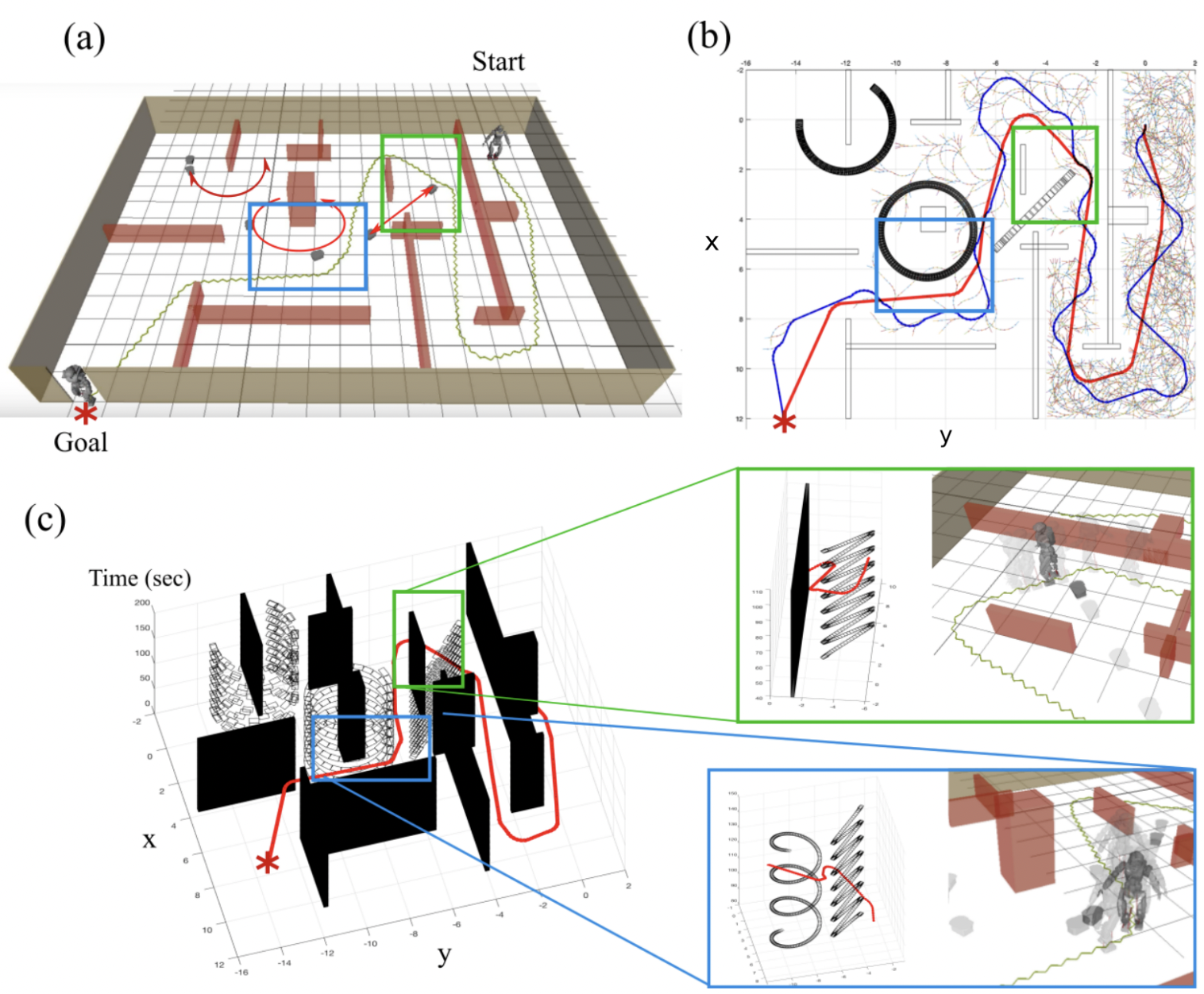
Junhyeok Ahn, Orion Campbell, Donghyun Kim, Luis Sentis IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018 PDF / BibTeX Kino-dynamic RRT planning for humanoids in maze environemnts. |
|
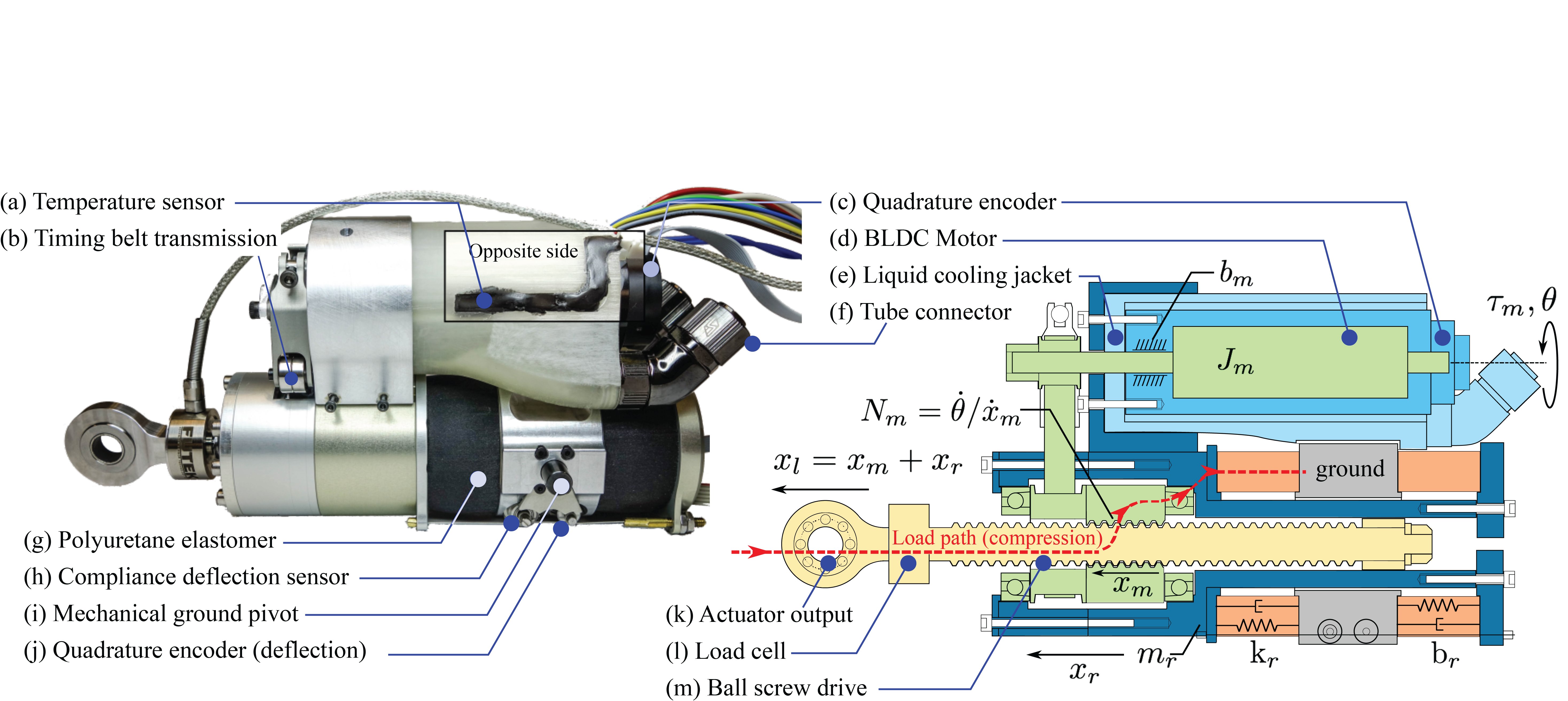
* Best Paper Award Donghyun Kim, Junhyeok Ahn, Orion Campbell, Nicholas Paine, Luis Sentis IEEE/ASME Transactions on Mechatronics, 2018 PDF / BibTeX Design, control, and evaluation of a new viscoelastic liquid cooled actuator technology. |
|
Donghyun Kim, Orion Campbell, Junhyeok Ahn, Luis Sentis Nicholas Paine, IEEE-RAS International Conference on Humanoid Robots, 2017 PDF / BibTeX Design, control, and evaluation of a new viscoelastic liquid cooled actuator technology. |

|
Steven Jens Jorgensen, Orion Campbell, Travis Llado, Donghyun Kim, Junhyeok Ahn, Luis Sentis arXiv, 2017 PDF / BibTeX Human-aware control policy that incorporates social cognitive theory and model predictive control with mixed integer constraints. |
|
|
|
|
|
Website source from Jon Barron and Chaitanya Malaviya
|